shortest path routing A form of ROUTING which attempts to send PACKETS of data over a network in such a way that the path taken from the sending computer to the recipient computer is minimized. The path can be measured in either physical distance or in the number of HOPS. This form of routing uses a NON-ADAPTIVE ROUTING ALGORITHM.
Refrence:http://www.encyclopedia.com/doc/1O12-shortestpathrouting.html
Open Shortest Path First
Open Shortest Path First (OSPF) is a dynamic routing protocol for use in Internet Protocol (IP) networks. Specifically, it is a link-state routing protocol and falls into the group of interior gateway protocols, operating within a single autonomous system (AS). It is defined as OSPF Version 2 in RFC 2328 (1998) for IPv4.[1] The updates for IPv6 are specified as OSPF Version 3 in RFC 5340 (2008).[2]
OSPF is perhaps the most widely-used interior gateway protocol (IGP) in large enterprise networks; IS-IS, another link-state routing protocol, is more common in large service provider networks. The most widely-used exterior gateway protocol is the Border Gateway Protocol (BGP), the principal routing protocol between autonomous systems on the Internet.
OSPF is perhaps the most widely-used interior gateway protocol (IGP) in large enterprise networks; IS-IS, another link-state routing protocol, is more common in large service provider networks. The most widely-used exterior gateway protocol is the Border Gateway Protocol (BGP), the principal routing protocol between autonomous systems on the Internet.
Neighbor relationships
Routers in the same broadcast domain or at each end of a point-to-point telecommunications link form adjacencies when they have detected each other. This detection occurs when a router identifies itself in a hello OSPF protocol packet. This is called a two way state and is the most basic relationship. The routers in an Ethernet or frame relay network select a designated router (DR) and a backup designated router (BDR) which act as a hub to reduce traffic between routers. OSPF uses both unicast and multicast to send "hello packets" and link state updates.
As a link state routing protocol, OSPF establishes and maintains neighbor relationships in order to exchange routing updates with other routers. The neighbor relationship table is called an adjacency database in OSPF. Provided that OSPF is configured correctly, OSPF forms neighbor relationships only with the routers directly connected to it. The routers that it forms a neighbor relationship with must be in the same area as the interface with which it is using to form a neighbor relationship. An interface can only belong to a single area.
As a link state routing protocol, OSPF establishes and maintains neighbor relationships in order to exchange routing updates with other routers. The neighbor relationship table is called an adjacency database in OSPF. Provided that OSPF is configured correctly, OSPF forms neighbor relationships only with the routers directly connected to it. The routers that it forms a neighbor relationship with must be in the same area as the interface with which it is using to form a neighbor relationship. An interface can only belong to a single area.
Area types
An OSPF network is divided into areas that are labeled with 32-bit area identifiers. The area identifiers are commonly, but not always, written in the dot-decimal notation of an IPv4 address. However, they are not IP addresses and may duplicate, without conflict, any IPv4 address. The area identifiers for IPv6 implementations of OSPF (OSPFv3) also use 32-bit identifiers written in the same notation. While most OSPF implementations will right-justify an area number written in other than dotted decimal format (e.g., area 1), it is wise to always use dotted-decimal formats. Most implementations expand area 1 to the area identifier 0.0.0.1, but some have been known to expand it as 1.0.0.0.
Areas are logical groupings of hosts and networks, including their routers having interfaces connected to any of the included networks. Each area maintains a separate link state database whose information may be summarized towards the rest of the network by the connecting router. Thus, the topology of an area is unknown outside of the area. This reduces the amount of routing traffic between parts of an autonomous system.
Several "special" area types are defined.
Areas are logical groupings of hosts and networks, including their routers having interfaces connected to any of the included networks. Each area maintains a separate link state database whose information may be summarized towards the rest of the network by the connecting router. Thus, the topology of an area is unknown outside of the area. This reduces the amount of routing traffic between parts of an autonomous system.
Several "special" area types are defined.
Backbone area
The backbone area (also known as area 0 or area 0.0.0.0) forms the core of an OSPF network. All other areas are connected to it, and inter-area routing happens via routers connected to the backbone area and to their own associated areas. It is the logical and physical structure for the 'OSPF domain' and is attached to all nonzero areas in the OSPF domain. Note that in OSPF the term Autonomous System Border Router (ASBR) is historic, in the sense that many OSPF domains can coexist in the same Internet-visible autonomous system, RFC1996 (ASGuidelines 1996, p. 25) [4].
The backbone area is responsible for distributing routing information between nonbackbone areas. The backbone must be contiguous, but it does not need to be physically contiguous; backbone connectivity can be established and maintained through the configuration of virtual links.
All OSPF areas must connect to the backbone area. This connection, however, can be through a virtual link. For example, assume area 0.0.0.1 has a physical connection to area 0.0.0.0. Further assume that area 0.0.0.2 has no direct connection to the backbone, but this area does have a connection to area 0.0.0.1. Area 0.0.0.2 can use a virtual link through the transit area 0.0.0.1 to reach the backbone. To be a transit area, an area has to have the transit attribute, so it cannot be stubby in any way.
The backbone area is responsible for distributing routing information between nonbackbone areas. The backbone must be contiguous, but it does not need to be physically contiguous; backbone connectivity can be established and maintained through the configuration of virtual links.
All OSPF areas must connect to the backbone area. This connection, however, can be through a virtual link. For example, assume area 0.0.0.1 has a physical connection to area 0.0.0.0. Further assume that area 0.0.0.2 has no direct connection to the backbone, but this area does have a connection to area 0.0.0.1. Area 0.0.0.2 can use a virtual link through the transit area 0.0.0.1 to reach the backbone. To be a transit area, an area has to have the transit attribute, so it cannot be stubby in any way.
Stub area
A stub area is an area which does not receive route advertisements external to the autonomous system (AS) and routing from within the area is based entirely on a default route. This reduces the size of the routing databases for the area's internal routers.
Modifications to the basic concept of stub areas exist in the not-so-stubby area (NSSA). In addition, several other proprietary variation have been implemented by systems vendors, such as the totally stubby area (TSA) and the NSSA totally stubby area, both an extension in Cisco Systems routing equipment.
Modifications to the basic concept of stub areas exist in the not-so-stubby area (NSSA). In addition, several other proprietary variation have been implemented by systems vendors, such as the totally stubby area (TSA) and the NSSA totally stubby area, both an extension in Cisco Systems routing equipment.
Not-so-stubby area
A not-so-stubby area (NSSA) is a type of stub area that can import autonomous system external routes and send them to other areas, but still cannot receive AS external routes from other areas. NSSA is an extension of the stub area feature that allows the injection of external routes in a limited fashion into the stub area.
Proprietary extensions
Totally stubby area
A totally stubby area in Cisco Systems routers,[5] is similar to a stub area. However, this area does not allow summary routes in addition to not having external routes, that is, inter-area (IA) routes are not summarized into totally stubby areas. The only way for traffic to get routed outside of the area is a default route which is the only Type-3 LSA advertised into the area. When there is only one route out of the area, fewer routing decisions have to be made by the route processor, which lowers system resource utilization. Occasionally, it is said that a TSA can have only one ABR.[citation needed] This is not true. If there are multiple ABRs, as might be required for high availability, routers interior to the TSA will send non-intra-area traffic to the ABR with the lowest intra-area metric (the "closest" ABR).
NSSA totally stubby area
Cisco Systems also implements a proprietary version of NSSA, called a NSSA totally stubby area. It takes on the attributes of a TSA, meaning that type 3 and type 4 summary routes are not flooded into this type of area. It is also possible to declare an area both totally stubby and not-so-stubby, which means that the area will receive only the default route from area 0.0.0.0, but can also contain an autonomous system border router (ASBR) that accepts external routing information and injects it into the local area, and from the local area into area 0.0.0.0.
Redistribution into an NSSA area creates a special type of LSA known as TYPE 7, which can exist only in an NSSA area. An NSSA ASBR generates this LSA, and an NSSA ABR router translates it into type 5 LSA which gets propagated into the OSPF domain.
An area can simultaneously be not-so-stubby and totally stubby. This is done when the practical place to put an ASBR, as, for example, with a newly acquired subsidiary, is on the edge of a totally stubby area. In such a case, the ASBR does send externals into the totally stubby area, and they are available to OSPF speakers within that area. In Cisco's implementation, the external routes can be summarized before injecting them into the totally stubby area. In general, the ASBR should not advertise default into the TSA-NSSA, although this can work with extremely careful design and operation, for the limited special cases in which such an advertisement makes sense.
By declaring the totally stubby area as NSSA, no external routes from the backbone, except the default route, enter the area being discussed. The externals do reach area 0.0.0.0 via the TSA-NSSA, but no routes other than the default route enter the TSA-NSSA. Routers in the TSA-NSSA send all traffic to the ABR, except to routes advertised by ASBR.
Cisco Systems also implements a proprietary version of NSSA, called a NSSA totally stubby area. It takes on the attributes of a TSA, meaning that type 3 and type 4 summary routes are not flooded into this type of area. It is also possible to declare an area both totally stubby and not-so-stubby, which means that the area will receive only the default route from area 0.0.0.0, but can also contain an autonomous system border router (ASBR) that accepts external routing information and injects it into the local area, and from the local area into area 0.0.0.0.
Redistribution into an NSSA area creates a special type of LSA known as TYPE 7, which can exist only in an NSSA area. An NSSA ASBR generates this LSA, and an NSSA ABR router translates it into type 5 LSA which gets propagated into the OSPF domain.
An area can simultaneously be not-so-stubby and totally stubby. This is done when the practical place to put an ASBR, as, for example, with a newly acquired subsidiary, is on the edge of a totally stubby area. In such a case, the ASBR does send externals into the totally stubby area, and they are available to OSPF speakers within that area. In Cisco's implementation, the external routes can be summarized before injecting them into the totally stubby area. In general, the ASBR should not advertise default into the TSA-NSSA, although this can work with extremely careful design and operation, for the limited special cases in which such an advertisement makes sense.
By declaring the totally stubby area as NSSA, no external routes from the backbone, except the default route, enter the area being discussed. The externals do reach area 0.0.0.0 via the TSA-NSSA, but no routes other than the default route enter the TSA-NSSA. Routers in the TSA-NSSA send all traffic to the ABR, except to routes advertised by ASBR.
Transit area
A transit area is an area with two or more OSPF border routers and is used to pass network traffic from one adjacent area to another. The transit area does not originate this traffic and is not the destination of such traffic.
Path preference
OSPF uses path cost as its basic routing metric, which was defined by the standard not to equate to any standard value such as speed, so the network designer could pick a metric important to the design. In practice, it is determined by the speed (bandwidth) of the interface addressing the given route, although that tends to need network-specific scaling factors now that links faster than 100 Mbit/s are common. Cisco uses a metric like 10^8/bandwidth (the base value, 10^8 by default, can be adjusted). So, a 100Mbit/s link will have a cost of 1, a 10Mbit/s a cost of 10 and so on. But for links faster than 100Mbit/s, the cost would be <1.
Metrics, however, are only directly comparable when of the same type. There are four types of metrics, with the most preferred type listed in order below. An intra-area route is always preferred to an inter-area route regardless of metric, and so on for the other types.
Metrics, however, are only directly comparable when of the same type. There are four types of metrics, with the most preferred type listed in order below. An intra-area route is always preferred to an inter-area route regardless of metric, and so on for the other types.
- Intra-area
- Inter-area
- External Type 1, which includes both the external path cost and the sum of internal path costs to the ASBR that advertises the route, 4.
- External Type 2, the value of which is solely that of the external path cost.
Refrence:http://en.wikipedia.org/wiki/Open_Shortest_Path_First
Traffic engineering
OSPF-TE is an extension to OSPF extending the expressivity to allow for traffic engineering and use on non-IP networks (RFC 3630)[6]. More information about the topology can be exchanged using opaque LSA carrying type-length-value elements. These extensions allow OSPF-TE to run completely out of band of the data plane network. This means that it can also be used on non-IP networks, such as optical networks.
OSPF-TE is mainly used within GMPLS networks, as a means to describe the topology over which GMPLS paths can be established. GMPLS then uses its own path setup and forwarding protocols, once it has the full network map.
OSPF-TE is mainly used within GMPLS networks, as a means to describe the topology over which GMPLS paths can be established. GMPLS then uses its own path setup and forwarding protocols, once it has the full network map.
OSPF router types
OSPF defines the following router types:
- Area border router (ABR)
- Autonomous system border router (ASBR)
- Internal router (IR)
- Backbone router (BR)
The router types are attributes of an OSPF process. A given physical router may have one or more OSPF processes. For example, a router that is connected to more than one area, and which receives routes from a BGP process connected to another AS, is both an ABR and an ASBR.
Each router has an identifier, customarily written in the dotted decimal format (e.g.: 1.2.3.4) of an IP address. This ID must be configured to an OSPF instance in order to be considered the ID. If not explicitly configured, the highest logical IP address will assume the router ID role. The router ID does not have to be a part of any routable subnet in the network and often isn't to avoid confusion.
Note: Do not confuse router types with designated router (DR), or backup designated router (BDR), which is an attribute of a router interface, not the router itself.
Area border router
An ABR is a router that connects one or more OSPF areas to the main backbone network. It is considered a member of all areas it is connected to. An ABR keeps multiple copies of the link-state database in memory, one for each area to which that router is connected.
Autonomous system boundary router
Autonomous system boundary router
An ASBR is a router that is connected to more than one AS and that exchanges routing information with routers in other ASs. ASBRs typically also run a non-IGP routing protocol (e.g., BGP), or use static routes, or both. An ASBR is used to distribute routes received from other ASs throughout its own AS.
Internal router
Internal router
An IR is a router that only has OSPF neighbor relationships with interfaces in the same area.
Backbone router
Backbone router
Backbone Routers: These are routers that are part of the OSPF backbone. By definition, this includes all area border routers, since those routers pass routing information between areas. However, a backbone router may also be a router that connects only to other backbone (or area border) routers, and is therefore not part of any area (other than Area 0).
Note that: an area border router is always a backbone router, but a backbone router is not necessarily an area border router.
Note that: an area border router is always a backbone router, but a backbone router is not necessarily an area border router.
Designated router
A designated router (DR) is the router interface elected among all routers on a particular multiaccess network segment, generally assumed to be broadcast multiaccess. Special techniques, often vendor-dependent, may be needed to support the DR function on nonbroadcast multiaccess (NBMA) media. It is usually wise to configure the individual virtual circuits of a NBMA subnet as individual point-to-point lines; the techniques used are implementation-dependent.
Do not confuse the DR with an OSPF router type. A given physical router can have some interfaces that are designated (DR), others that are backup designated (BDR), and others that are non-designated. If no router is DR or BDR on a given subnet, the DR is first elected, and then a second election is held if there is more than one BDR. [8] The DR is elected based on the following default criteria:
- If the priority setting on a OSPF router is set to 0, that means it can NEVER become a DR or BDR (Backup Designated Router).
- When a DR fails and the BDR takes over, there is another election to see who becomes the replacement BDR.
- The router sending the Hello packets with the highest priority wins the election.
- If two or more routers tie with the highest priority setting, the router sending the Hello with the highest RID (Router ID) wins. NOTE: a RID is the highest logical (loopback) IP address configured on a router, if no logical/loopback IP address is set then the Router uses the highest IP address configured on its active interfaces. (e.g. 192.168.0.1 would be higher than 10.1.1.2).
- Usually the router with the second highest priority number becomes the BDR.
- The priority values range between 0 - 254, with a higher value increasing its chances of becoming DR or BDR.
- IF a HIGHER priority OSPF router comes online AFTER the election has taken place, it will not become DR or BDR until (at least) the DR and BDR fail.
- If the current DR 'goes down' the current BDR becomes the new DR and a new election takes place to find another BDR. If the new DR then 'goes down' and the original DR is now available, it then becomes DR again, but no change is made to the current BDR.
DR's exist for the purpose of reducing network traffic by providing a source for routing updates, the DR maintains a complete topology table of the network and sends the updates to the other routers via multicast. All routers in an area will form a slave/master relationship with the DR. They will form adjacencies with the DR and BDR only. Every time a router sends an update, it sends it to the DR and BDR on the multicast address 224.0.0.6. The DR will then send the update out to all other routers in the area, to the multicast address 224.0.0.5. This way all the routers do not have to constantly update each other, and can rather get all their updates from a single source. The use of multicasting further reduces the network load. DRs and BDRs are always setup/elected on Broadcast networks (Ethernet). DR's can also be elected on NBMA (Non-Broadcast Multi-Access) networks such as Frame Relay or ATM. DRs or BDRs are not elected on point-to-point links (such as a point-to-point WAN connection) because the two routers on either sides of the link must become fully adjacent and the bandwidth between them cannot be further optimized.
source:http://en.wikipedia.org/wiki/Open_Shortest_Path_First
Distance-Vector Routing Protocols
This type of routing protocol requires that each router simply inform its neighbors of its routing table. For each network path, the receiving routers pick the neighbor advertising the lowest cost, then add this entry into its routing table for re-advertisement. Hello and RIP are common D-V routing protocols. Common enhancements to D-V algorithms include split horizon, poison reverse, triggered updates, and holddown. You will find a good discussion of D-V, or Bellman-Ford algorithms in RIP's protocol specification, RFC 1058.
source:http://www.freesoft.org/CIE/Topics/117.htm
source:http://www.freesoft.org/CIE/Topics/117.htm
Distance-vector routing protocol
A distance-vector routing protocol is one of the two major classes of routing protocols used in packet-switched networks for computer communications, the other major class being the link-state protocol. A distance-vector routing protocol uses the Bellman-Ford algorithm to calculate paths.
Distance Vector algorithm is routing algorithm that has information of the routers attached to it.
Examples of distance-vector routing protocols include RIPv1 and 2 and IGRP. EGP and BGP are not pure distance-vector routing protocols, because a distance-vector protocol calculates routes based only on link costs whereas in BGP, for example, the local route preference value takes priority over the link cost. In many cases, EGP and BGP are considered DV (distance-vector) routing protocols.
A distance-vector routing protocol requires that a router informs its neighbors of topology changes periodically and, in some cases, when a change is detected in the topology of a network. Compared to link-state protocols, which require a router to inform all the nodes in a network of topology changes, distance-vector routing protocols have less computational complexity and message overhead
Distance Vector algorithm is routing algorithm that has information of the routers attached to it.
Examples of distance-vector routing protocols include RIPv1 and 2 and IGRP. EGP and BGP are not pure distance-vector routing protocols, because a distance-vector protocol calculates routes based only on link costs whereas in BGP, for example, the local route preference value takes priority over the link cost. In many cases, EGP and BGP are considered DV (distance-vector) routing protocols.
A distance-vector routing protocol requires that a router informs its neighbors of topology changes periodically and, in some cases, when a change is detected in the topology of a network. Compared to link-state protocols, which require a router to inform all the nodes in a network of topology changes, distance-vector routing protocols have less computational complexity and message overhead
Method of Distance-vector routing protocol
The methods used to calculate the best path for a network are different between different routing protocols but the fundamental features of distance-vector algorithms are the same across all DV based protocols.
As the name suggests the DV protocol is based on calculating the direction and distance to any link in a network. The cost of reaching a destination is calculated using various route metrics. RIP uses the hop count of the destination whereas IGRP takes into account other information such as node delay and available bandwidth.
Updates are performed periodically in a distance-vector protocol where all or part of a router's routing table is sent to all its neighbors that are configured to use the same distance-vector routing protocol. RIP supports cross-platform distance vector routing whereas IGRP is a Cisco Systems proprietary distance vector routing protocol. Once a router has this information it is able to amend its own routing table to reflect the changes and then inform its neighbors of the changes. This process has been described as ‘routing by rumor’ because routers are relying on the information they receive from other routers and cannot determine if the information is actually valid and true. There are a number of features which can be used to help with instability and inaccurate routing information
As the name suggests the DV protocol is based on calculating the direction and distance to any link in a network. The cost of reaching a destination is calculated using various route metrics. RIP uses the hop count of the destination whereas IGRP takes into account other information such as node delay and available bandwidth.
Updates are performed periodically in a distance-vector protocol where all or part of a router's routing table is sent to all its neighbors that are configured to use the same distance-vector routing protocol. RIP supports cross-platform distance vector routing whereas IGRP is a Cisco Systems proprietary distance vector routing protocol. Once a router has this information it is able to amend its own routing table to reflect the changes and then inform its neighbors of the changes. This process has been described as ‘routing by rumor’ because routers are relying on the information they receive from other routers and cannot determine if the information is actually valid and true. There are a number of features which can be used to help with instability and inaccurate routing information
Limitations in Distance-vector routing protocol
The Bellman-Ford algorithm does not prevent routing loops from happening and suffers from the count-to-infinity problem. The core of the count-to-infinity problem is that if A tells B that it has a path somewhere, there is no way for B to know if the path has B as a part of it. To see the problem clearly, imagine a subnet connected like A-B-C-D-E-F, and let the metric between the routers be "number of jumps". Now suppose that A goes down (out of order). In the vector-update-process B notices that its once very short route of 1 to A is down - B does not receive the vector update from A. The problem is, B also gets an update from C, and C is still not aware of the fact that A is down - so it tells B that A is only two jumps from it, which is false. This slowly propagates through the network until it reaches infinity (in which case the algorithm corrects itself, due to the "Relax property" of Bellman Ford).
Partial solutions of Distance-vector routing protocol
RIP uses Split Horizon with Poison Reverse technique to reduce the chance of forming loops and use a maximum number of hops to counter the count-to-infinity problem. These measures avoid the formation of routing loops in some, but not all, cases. The addition of a hold time (refusing route updates for a few minutes after a route retraction) avoids loop formation in virtually all cases, but causes a significant increase in convergence times.
A number of loop-free distance vector protocols, such as EIGRP and DSDV, have been developed. These avoid loop formation in all cases, but suffer from increased complexity, and their deployment has been slowed down by the success of link-state protocols such as OSPF.
source:http://en.wikipedia.org/wiki/Distance-vector_routing_protocol
A number of loop-free distance vector protocols, such as EIGRP and DSDV, have been developed. These avoid loop formation in all cases, but suffer from increased complexity, and their deployment has been slowed down by the success of link-state protocols such as OSPF.
source:http://en.wikipedia.org/wiki/Distance-vector_routing_protocol
On-demand routing protocols
Another in the family of routing protocols for mobile ad-hoc network is on-demand routing protocols. With on-demand protocols, if a source node requires a route to the destination for which it does not have route information, it initiates a route discovery process which goes from one node to the other until it reaches to the destination or an intermediate node has a route to the destination.
It is the responsibility of the route request receiver node to reply back to the source node about the possible route to the destination. The source node uses this route for data transmission to the destination node. Some of the better known on-demand protocols are Ad-hoc On-demand Distance Vector routing (AODV), Dynamic Source Routing (DSR) and Temporary Ordered Routing Algorithm (TORA).
These protocols differ on storing the previously known route information and on how they use the established route data. Again, in a network with many participating nodes we may suffer with same sort of problems what we have seen in table-driven protocols.
ConclusionIn conclusion, routing is one of the core issues in mobile ad-hoc network. An effective routing mechanism will be helpful to extend the successful deployment of mobile ad-hoc networks. Current routing protocols provide routing solutions up to a certain level, but are lacking the ability to handle other related issues.
Moreover most of these protocols have designed and implemented on small scale. If these protocols could be extended further by taking into accounts other routing related factors we may come out with a standard routing solution for mobile ad-hoc network.
Dr. Humayun Bakht completed his Ph.D at the School of Computing and Mathematics in Liverpool at John Moores University. Prior to his current course of studies, he has successfully completed his MSc Software Engineering and BSc Electronics Engineering from University of Liverpool UK and Sir Syed University of Engineering and Technology in Karachi, Pakistan. Humayun's research interest is mobile ad-hoc networks, in particular, the development of a new routing algorithm for this type of networking. He can be reached at humayunbakht@yahoo.co.uk and you can visit his Web site at http://www.geocities.com/humayunbakht/.
It is the responsibility of the route request receiver node to reply back to the source node about the possible route to the destination. The source node uses this route for data transmission to the destination node. Some of the better known on-demand protocols are Ad-hoc On-demand Distance Vector routing (AODV), Dynamic Source Routing (DSR) and Temporary Ordered Routing Algorithm (TORA).
These protocols differ on storing the previously known route information and on how they use the established route data. Again, in a network with many participating nodes we may suffer with same sort of problems what we have seen in table-driven protocols.
ConclusionIn conclusion, routing is one of the core issues in mobile ad-hoc network. An effective routing mechanism will be helpful to extend the successful deployment of mobile ad-hoc networks. Current routing protocols provide routing solutions up to a certain level, but are lacking the ability to handle other related issues.
Moreover most of these protocols have designed and implemented on small scale. If these protocols could be extended further by taking into accounts other routing related factors we may come out with a standard routing solution for mobile ad-hoc network.
Dr. Humayun Bakht completed his Ph.D at the School of Computing and Mathematics in Liverpool at John Moores University. Prior to his current course of studies, he has successfully completed his MSc Software Engineering and BSc Electronics Engineering from University of Liverpool UK and Sir Syed University of Engineering and Technology in Karachi, Pakistan. Humayun's research interest is mobile ad-hoc networks, in particular, the development of a new routing algorithm for this type of networking. He can be reached at humayunbakht@yahoo.co.uk and you can visit his Web site at http://www.geocities.com/humayunbakht/.
Routing protocols for mobile ad-hoc networks
We continue our series on mobile ad-hoc networks with a discussion of routing protocols, or how the information is going to move throughout the network.
Mobile ad-hoc networks, also known as short-lived networks, are autonomous systems of mobile nodes forming network in the absence of any centralized support. This is a new form of network and might be able to provide services at places where it is not possible otherwise. Absence of fixed infrastructure poses several types of challenges for this type of networking. Among these challenges is routing.
By routing, we mean process of exchanging information from one station to the other stations of the network. Routing protocols of mobile ad-hoc network tend to need different approaches from existing Internet protocols, since most of the existing Internet protocols were designed to support routing in a network with fixed structure. In the academic and industrial world, those who think about such things have written quite a few papers proposing various routing solutions for mobile ad-hoc networks. Proposed solutions could be classified into six types: table-driven, on-demand, hierarchical, power-aware, geographical, and multicast protocols.
Table-driven protocolsTable-driven protocols are one of the old ways of acquiring routing in mobile ad-hoc networks. These protocols maintain consistent overview of the network. Each node uses routing tables to store the location information of other nodes in the network. This information is used to transfer data among various nodes of the network.
To ensure the freshness of the routing tables, these protocols adopts different sorts of mechanisms. One of the adopted methods is broadcasting "hello," a special message containing address information, at fixed intervals of time. On receiving this message, each node updates its routing tables with fresh locations information of other participating nodes. Destination Sequence Distance Vector routing protocol (DSDV), Wireless Routing Protocol (WRP) and Cluster-head Gateway Switch Routing (CGSR) are some of the popular table-driven protocols for mobile ad-hoc networks.
Table-driven protocols might not be considered an effective routing solution for mobile ad-hoc network. Nodes in mobile ad-hoc networks operate with low battery power and with limited bandwidth. Presence of high mobility, large routing tables and low scalability result in consumption of bandwidth and battery life of the nodes. Moreover continuous updates could create unnecessary network overhead.
source:http://www.computingunplugged.com/issues/issue200407/00001326001.html
Mobile ad-hoc networks, also known as short-lived networks, are autonomous systems of mobile nodes forming network in the absence of any centralized support. This is a new form of network and might be able to provide services at places where it is not possible otherwise. Absence of fixed infrastructure poses several types of challenges for this type of networking. Among these challenges is routing.
By routing, we mean process of exchanging information from one station to the other stations of the network. Routing protocols of mobile ad-hoc network tend to need different approaches from existing Internet protocols, since most of the existing Internet protocols were designed to support routing in a network with fixed structure. In the academic and industrial world, those who think about such things have written quite a few papers proposing various routing solutions for mobile ad-hoc networks. Proposed solutions could be classified into six types: table-driven, on-demand, hierarchical, power-aware, geographical, and multicast protocols.
Table-driven protocolsTable-driven protocols are one of the old ways of acquiring routing in mobile ad-hoc networks. These protocols maintain consistent overview of the network. Each node uses routing tables to store the location information of other nodes in the network. This information is used to transfer data among various nodes of the network.
To ensure the freshness of the routing tables, these protocols adopts different sorts of mechanisms. One of the adopted methods is broadcasting "hello," a special message containing address information, at fixed intervals of time. On receiving this message, each node updates its routing tables with fresh locations information of other participating nodes. Destination Sequence Distance Vector routing protocol (DSDV), Wireless Routing Protocol (WRP) and Cluster-head Gateway Switch Routing (CGSR) are some of the popular table-driven protocols for mobile ad-hoc networks.
Table-driven protocols might not be considered an effective routing solution for mobile ad-hoc network. Nodes in mobile ad-hoc networks operate with low battery power and with limited bandwidth. Presence of high mobility, large routing tables and low scalability result in consumption of bandwidth and battery life of the nodes. Moreover continuous updates could create unnecessary network overhead.
source:http://www.computingunplugged.com/issues/issue200407/00001326001.html
Mobile ad hoc network
A mobile ad hoc network (MANET), sometimes called a mobile mesh network, is a self-configuring network of mobile devices connected by wireless links.[1]
Each device in a MANET is free to move independently in any direction, and will therefore change its links to other devices frequently. Each must forward traffic unrelated to its own use, and therefore be a router. The primary challenge in building a MANET is equipping each device to continuously maintain the information required to properly route traffic.
Such networks may operate by themselves or may be connected to the larger Internet.
MANETs are a kind of wireless ad hoc networks that usually has a routeable networking environment on top of a Link Layer ad hoc network. They are also a type of mesh network, but many mesh networks are not mobile or not wireless.
The growth of laptops and 802.11/Wi-Fi wireless networking have made MANETs a popular research topic since the mid- to late 1990s. Many academic papers evaluate protocols and abilities assuming varying degrees of mobility within a bounded space, usually with all nodes within a few hops of each other and usually with nodes sending data at a constant rate. Different protocols are then evaluated based on the packet drop rate, the overhead introduced by the routing protocol, and other measures.
source:http://en.wikipedia.org/wiki/Mobile_ad-hoc_network
Each device in a MANET is free to move independently in any direction, and will therefore change its links to other devices frequently. Each must forward traffic unrelated to its own use, and therefore be a router. The primary challenge in building a MANET is equipping each device to continuously maintain the information required to properly route traffic.
Such networks may operate by themselves or may be connected to the larger Internet.
MANETs are a kind of wireless ad hoc networks that usually has a routeable networking environment on top of a Link Layer ad hoc network. They are also a type of mesh network, but many mesh networks are not mobile or not wireless.
The growth of laptops and 802.11/Wi-Fi wireless networking have made MANETs a popular research topic since the mid- to late 1990s. Many academic papers evaluate protocols and abilities assuming varying degrees of mobility within a bounded space, usually with all nodes within a few hops of each other and usually with nodes sending data at a constant rate. Different protocols are then evaluated based on the packet drop rate, the overhead introduced by the routing protocol, and other measures.
source:http://en.wikipedia.org/wiki/Mobile_ad-hoc_network
Types of MANET
- Vehicular Ad Hoc Networks (VANETs) are used for communication among vehicles and between vehicles and roadside equipment.
- Intelligent vehicular ad hoc networks (InVANETs) are a kind of artificial intelligence that helps vehicles to behave in intelligent manners during vehicle-to-vehicle collisions, accidents, drunken driving etc.
- Internet Based Mobile Ad-hoc Networks (iMANET) are ad-hoc networks that link mobile nodes and fixed Internet-gateway nodes. In such type of networks normal ad-hoc routing algorithms don't apply directly.
Practical use
One Laptop per Child program has developed a laptop making use of an IEEE 802.11s based ad hoc wireless mesh networking chip. It is the only such device sold to consumers.
In September 2007, the Swedish company TerraNet AB presented a mesh network of mobile phones that allowed calls and data to be routed between participating handsets, without cell sites.
In September 2007, the Swedish company TerraNet AB presented a mesh network of mobile phones that allowed calls and data to be routed between participating handsets, without cell sites.
What is Wireless ad hoc network?
A wireless ad hoc network is a decentralized wireless network.[1] The network is ad hoc because each node is willing to forward data for other nodes, and so the determination of which nodes forward data is made dynamically based on the network connectivity. This is in contrast to wired networks in which routers perform the task of routing. It is also in contrast to managed (infrastructure) wireless networks, in which a special node known as an access point manages communication among other nodes.
Application of Wireless ad hoc network
The decentralized nature of wireless ad hoc networks makes them suitable for a variety of applications where central nodes can't be relied on, and may improve the scalability of wireless ad hoc networks compared to wireless managed networks, though theoretical[2] and practical[3] limits to the overall capacity of such networks have been identified.
Minimal configuration and quick deployment make ad hoc networks suitable for emergency situations like natural disasters or military conflicts. The presence of a dynamic and adaptive routing protocol will enable ad hoc networks to be formed quickly.
Wireless ad hoc networks can be further classified by their application:
mobile ad hoc networks (MANETs) wireless mesh networks wireless sensor networks.
Refrence:http://en.wikipedia.org/wiki/Wireless_ad_hoc_network
Minimal configuration and quick deployment make ad hoc networks suitable for emergency situations like natural disasters or military conflicts. The presence of a dynamic and adaptive routing protocol will enable ad hoc networks to be formed quickly.
Wireless ad hoc networks can be further classified by their application:
mobile ad hoc networks (MANETs) wireless mesh networks wireless sensor networks.
Refrence:http://en.wikipedia.org/wiki/Wireless_ad_hoc_network
Wireless Ad Hoc Sensor Networks




A wireless ad hoc sensor network consists of a number of sensors spread across a geographical area. Each sensor has wireless communication capability and some level of intelligence for signal processing and networking of the data. Some examples of wireless ad hoc sensor networks are the following:
- Military sensor networks to detect and gain as much information as possible about enemy movements, explosions, and other phenomena of interest.
- Sensor networks to detect and characterize Chemical, Biological, Radiological, Nuclear, and Explosive (CBRNE) attacks and material.
- Sensor networks to detect and monitor environmental changes in plains, forests, oceans, etc.
- Wireless traffic sensor networks to monitor vehicle traffic on highways or in congested parts of a city.
- Wireless surveillance sensor networks for providing security in shopping malls, parking garages, and other facilities.
- Wireless parking lot sensor networks to determine which spots are occupied and which are free.
The above list suggests that wireless ad hoc sensor networks offer certain capabilities and enhancements in operational efficiency in civilian applications as well as assist in the national effort to increase alertness to potential terrorist threats.Two ways to classify wireless ad hoc sensor networks are whether or not the nodes are individually addressable, and whether the data in the network is aggregated. The sensor nodes in a parking lot network should be individually addressable, so that one can determine the locations of all the free spaces. This application shows that it may be necessary to broadcast a message to all the nodes in the network. If one wants to determine the temperature in a corner of a room, then addressability may not be so important. Any node in the given region can respond. The ability of the sensor network to aggregate the data collected can greatly reduce the number of messages that need to be transmitted across the network. This function of data fusion is discussed more below.The basic goals of a wireless ad hoc sensor network generally depend upon the application, but the following tasks are common to many networks:
- Determine the value of some parameter at a given location: In an environmental network, one might one to know the temperature, atmospheric pressure, amount of sunlight, and the relative humidity at a number of locations. This example shows that a given sensor node may be connected to different types of sensors, each with a different sampling rate and range of allowed values.
- Detect the occurrence of events of interest and estimate parameters of the detected event or events: In the traffic sensor network, one would like to detect a vehicle moving through an intersection and estimate the speed and direction of the vehicle.
- Classify a detected object: Is a vehicle in a traffic sensor network a car, a mini-van, a light truck, a bus, etc.
- Track an object: In a military sensor network, track an enemy tank as it moves through the geographic area covered by the network.
In these four tasks, an important requirement of the sensor network is that the required data be disseminated to the proper end users. In some cases, there are fairly strict time requirements on this communication. For example, the detection of an intruder in a surveillance network should be immediately communicated to the police so that action can be taken.
Wireless ad hoc sensor network requirements include the following:
- Large number of (mostly stationary) sensors: Aside from the deployment of sensors on the ocean surface or the use of mobile, unmanned, robotic sensors in military operations, most nodes in a smart sensor network are stationary. Networks of 10,000 or even 100,000 nodes are envisioned, so scalability is a major issue.
- Low energy use: Since in many applications the sensor nodes will be placed in a remote area, service of a node may not be possible. In this case, the lifetime of a node may be determined by the battery life, thereby requiring the minimization of energy expenditure.
- Network self-organization: Given the large number of nodes and their potential placement in hostile locations, it is essential that the network be able to self-organize; manual configuration is not feasible. Moreover, nodes may fail (either from lack of energy or from physical destruction), and new nodes may join the network. Therefore, the network must be able to periodically reconfigure itself so that it can continue to function. Individual nodes may become disconnected from the rest of the network, but a high degree of connectivity must be maintained.
- Collaborative signal processing: Yet another factor that distinguishes these networks from MANETs is that the end goal is detection/estimation of some events of interest, and not just communications. To improve the detection/estimation performance, it is often quite useful to fuse data from multiple sensors. This data fusion requires the transmission of data and control messages, and so it may put constraints on the network architecture.
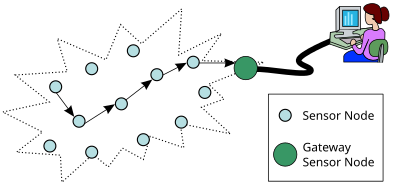
- Querying ability: A user may want to query an individual node or a group of nodes for information collected in the region. Depending on the amount of data fusion performed, it may not be feasible to transmit a large amount of the data across the network. Instead, various local sink nodes will collect the data from a given area and create summary messages. A query may be directed to the sink node nearest to the desired location.
Sensor types and system architecture:
With the coming availability of low cost, short range radios along with advances in wireless networking, it is expected that wireless ad hoc sensor networks will become commonly deployed. In these networks, each node may be equipped with a variety of sensors, such as acoustic, seismic, infrared, still/motion videocamera, etc. These nodes may be organized in clusters such that a locally occurring event can be detected by most of, if not all, the nodes in a cluster. Each node may have sufficient processing power to make a decision, and it will be able to broadcast this decision to the other nodes in the cluster. One node may act as the cluster master, and it may also contain a longer range radio using a protocol such as IEEE 802.11 or Bluetooth.
source: itl.nist.gov/div892/wahn_ssn.shtml
Sensor node
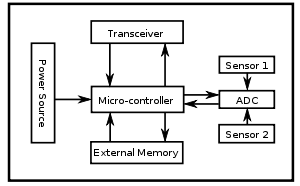 A sensor node, also known as a 'mote' (chiefly in North America), is a node in a wireless sensor network that is capable of performing some processing, gathering sensory information and communicating with other connected nodes in the network. The typical architecture of the sensor node is shown in figure.
A sensor node, also known as a 'mote' (chiefly in North America), is a node in a wireless sensor network that is capable of performing some processing, gathering sensory information and communicating with other connected nodes in the network. The typical architecture of the sensor node is shown in figure.Components of a Sensor Node
The main components of a sensor node as seen from the figure are microcontroller, transceiver, external memory, power source and one or more sensors.
Microcontroller
Microcontroller performs tasks, processes data and controls the functionality of other components in the sensor node. Other alternatives that can be used as a controller are: General purpose desktop microprocessor, Digital signal processors, Field Programmable Gate Array and Application-specific integrated circuit. Microcontrollers are most suitable choice for sensor node. Each of the four choices has their own advantages and disadvantages. Microcontrollers are the best choices for embedded systems. Because of their flexibility to connect to other devices, programmable, power consumption is less, as these devices can go to sleep state and part of controller can be active. In general purpose microprocessor the power consumption is more than the microcontroller, therefore it is not a suitable choice for sensor node. Digital Signal Processors are appropriate for broadband wireless communication. But in Wireless Sensor Networks, the wireless communication should be modest i.e., simpler, easier to process modulation and signal processing tasks of actual sensing of data is less complicated. Therefore the advantages of DSP's is not that much of importance to wireless sensor node. Field Programmable Gate Arrays can be reprogrammed and reconfigured according to requirements, but it takes time and energy. Therefore FPGA's is not advisable. Application Specific Integrated Circuits are specialized processors designed for a given application. ASIC's provide the functionality in the form of hardware, but microcontrollers provide it through software.
Transceiver
Sensor nodes make use of ISM band which gives free radio, huge spectrum allocation and global availability. The various choices of wireless transmission media are Radio frequency, Optical communication (Laser) and Infrared. Laser requires less energy, but needs line-of-sight for communication and also sensitive to atmospheric conditions. Infrared like laser, needs no antenna but is limited in its broadcasting capacity. Radio Frequency (RF) based communication is the most relevant that fits to most of the WSN applications. WSN’s use the communication frequencies between about 433 MHz and 2.4 GHz. The functionality of both transmitter and receiver are combined into a single device know as transceivers are used in sensor nodes. Transceivers lack unique identifier. The operational states are Transmit, Receive, Idle and Sleep.
Current generation radios have a built-in state machines that perform this operation automatically. Radios used in transceivers operate in four different modes: Transmit, Receive, Idle, and Sleep. Radios operating in Idle mode results in power consumption, almost equal to power consumed in Receive mode [4]. Thus it is better to completely shutdown the radios rather than in the Idle mode when it is not Transmitting or Receiving. And also significant amount of power is consumed when switching from Sleep mode to Transmit mode to transmit a packet.
External Memory
From an energy perspective, the most relevant kinds of memory are on-chip memory of a microcontroller and FLASH memory - off-chip RAM is rarely if ever used. Flash memories are used due to its cost and storage capacity. Memory requirements are very much application dependent. Two categories of memory based on the purpose of storage a) User memory used for storing application related or personal data. b) Program memory used for programming the device. This memory also contains identification data of the device if any.
Power Source
Power consumption in the sensor node is for the Sensing, Communication and Data Processing. More energy is required for data communication in sensor node. Energy expenditure is less for sensing and data processing. The energy cost of transmitting 1 Kb a distance of 100 m is approximately the same as that for the executing 3 million instructions by 100 million instructions per second/W processor. Power is stored either in Batteries or Capacitors. Batteries are the main source of power supply for sensor nodes. Namely two types of batteries used are chargeable and non-rechargeable. They are also classified according to electrochemical material used for electrode such as NiCd(nickel-cadmium), NiZn(nickel-zinc), Nimh (nickel metal hydride), and Lithium-Ion. Current sensors are developed which are able to renew their energy from solar, thermogenerator, or vibration energy. Two major power saving policies used are Dynamic Power Management (DPM) and Dynamic Voltage Scaling (DVS)[5]. DPM takes care of shutting down parts of sensor node which are not currently used or active. DVS scheme varies the power levels depending on the non-deterministic workload. By varying the voltage along with the frequency, it is possible to obtain quadratic reduction in power consumption.
Sensors
Sensors are hardware devices that produce measurable response to a change in a physical condition like temperature and pressure. Sensors sense or measure physical data of the area to be monitored. The continual analog signal sensed by the sensors is digitized by an Analog-to-digital converter and sent to controllers for further processing. Characteristics and requirements of Sensor node should be small size, consume extremely low energy, operate in high volumetric densities, be autonomous and operate unattended, and be adaptive to the environment. As wireless sensor nodes are micro-electronic sensor device, can only be equipped with a limited power source of less than 0.5 Ah and 1.2 V. Sensors are classified into three categories.
- Passive, Omni Directional Sensors: Passive sensors sense the data without actually manipulating the environment by active probing. They are self powered i.e energy is needed only to amplify their analog signal. There is no notion of “direction” involved in these measurements.
- Passive, narrow-beam sensors: These sensors are passive but they have well-defined notion of direction of measurement. Typical example is ‘camera’.
- Active Sensors: These group of sensors actively probe the environment, for example, a sonar or radar sensor or some type of seismic sensor, which generate shock waves by small explosions.
The overall theoretical work on WSN’s considers Passive, Omni directional sensors. Each sensor node has a certain area of coverage for which it can reliably and accurately report the particular quantity that it is observing. Several sources of power consumption in sensors are a) Signal sampling and conversion of physical signals to electrical ones, b) signal conditioning, and c) analog-to-digital conversion. Spatial density of sensor nodes in the field may be as high as 20 nodes/ m3 .
References^ Smart Dust
^ Home
^ CENS: Center for Embedded Networked Sensing
^ Y. Xu, J. Heidemann, and D. Estrin, Geography-informed energy conservation for ad-hoc routing, in Proc. Mobicom, 2001, pp. 70-84
^ Dynamic Power Management in Wireless Sensor Networks, Amit Sinha and Anantha Chandrakasan, IEEE Design & Test of Computers, Vol. 18, No. 2, March-April 2001
Wireless local loop

Wireless local loop (WLL), is a term for the use of a wireless communications link as the "last mile / first mile" connection for delivering plain old telephone service (POTS) and/or broadband Internet to telecommunications customers. Various types of WLL systems and technologies exist.
Definition of Fixed Wireless Service
Fixed Wireless Terminal (FWT) units differ from conventional mobile terminal units operating within cellular networks - such as GSM - in that a fixed wireless terminal or desk phone will be limited to an almost permanent location with almost no roaming abilities.
WLL and FWTs are generic terms for radio based telecommunications technologies and the respective devices which can be implemented using a number of different wireless and radio technologies.
Wireless Local Loop service is segmented into a number of broad market and deployment groups. Services are split between Licensed - commonly used by Carriers and Telcos - and Unlicensed services more commonly deployed by home users and Wireless ISPs (WISPs
WLL and FWTs are generic terms for radio based telecommunications technologies and the respective devices which can be implemented using a number of different wireless and radio technologies.
Wireless Local Loop service is segmented into a number of broad market and deployment groups. Services are split between Licensed - commonly used by Carriers and Telcos - and Unlicensed services more commonly deployed by home users and Wireless ISPs (WISPs
References
^ Sprint, Clearwire Near WiMax Deal - TheStreet.com
2. "Telecommunications Technology Expert". Archived from the original 2009-06-02. ims-expertservices.com. Retrieved on 2009-06-18
^ Sprint, Clearwire Near WiMax Deal - TheStreet.com
2. "Telecommunications Technology Expert". Archived from the original 2009-06-02. ims-expertservices.com. Retrieved on 2009-06-18
Wireless sensor network
A wireless sensor network (WSN) is a wireless network consisting of spatially distributed autonomous devices using sensors to cooperatively monitor physical or environmental conditions, such as temperature, sound, vibration, pressure, motion or pollutants, at different locations.[1][2] The development of wireless sensor networks was originally motivated by military applications such as battlefield surveillance. However, wireless sensor networks are now used in many industrial and civilian application areas, including industrial process monitoring and control, machine health monitoring, environment and habitat monitoring, healthcare applications, home automation, and traffic control.[1][3]
In addition to one or more sensors, each node in a sensor network is typically equipped with a radio transceiver or other wireless communications device, a small microcontroller, and an energy source, usually a battery. The envisaged size of a single sensor node can vary from shoebox-sized nodes down to devices the size of grain of dust,[1] although functioning 'motes' of genuine microscopic dimensions have yet to be created. The cost of sensor nodes is similarly variable, ranging from hundreds of dollars to a few pence , depending on the size of the sensor network and the complexity required of individual sensor nodes.[1] Size and cost constraints on sensor nodes result in corresponding constraints on resources such as energy, memory, computational speed and bandwidth.[1]
In addition to one or more sensors, each node in a sensor network is typically equipped with a radio transceiver or other wireless communications device, a small microcontroller, and an energy source, usually a battery. The envisaged size of a single sensor node can vary from shoebox-sized nodes down to devices the size of grain of dust,[1] although functioning 'motes' of genuine microscopic dimensions have yet to be created. The cost of sensor nodes is similarly variable, ranging from hundreds of dollars to a few pence , depending on the size of the sensor network and the complexity required of individual sensor nodes.[1] Size and cost constraints on sensor nodes result in corresponding constraints on resources such as energy, memory, computational speed and bandwidth.[1]
refrence:http://en.wikipedia.org/
Applications of wireless technology
Security systems
Wireless technology may supplement or replace hard wired implementations in security systems for homes or office buildings.
[edit] Television remote control
Modern televisions use wireless (generally infrared) remote control units. Now radio waves are also used.
[edit] Cellular telephony (phones and modems)
Perhaps the best known example of wireless technology is the cellular telephone and modems. These instruments use radio waves to enable the operator to make phone calls from many locations world-wide. They can be used anywhere that there is a cellular telephone site to house the equipment that is required to transmit and receive the signal that is used to transfer both voice and data to and from these instruments.
refrence:http://en.wikipedia.org
Wireless technology may supplement or replace hard wired implementations in security systems for homes or office buildings.
[edit] Television remote control
Modern televisions use wireless (generally infrared) remote control units. Now radio waves are also used.
[edit] Cellular telephony (phones and modems)
Perhaps the best known example of wireless technology is the cellular telephone and modems. These instruments use radio waves to enable the operator to make phone calls from many locations world-wide. They can be used anywhere that there is a cellular telephone site to house the equipment that is required to transmit and receive the signal that is used to transfer both voice and data to and from these instruments.
refrence:http://en.wikipedia.org
Wireless communication

The term "wireless" has become a generic and all-encompassing word used to describe communications in which electromagnetic waves or RF (rather than some form of wire) carry a signal over part or the entire communication path. Common examples of wireless equipment in use today include:
Professional LMR (Land Mobile Radio) and SMR (Specialized Mobile Radio) typically used by business, industrial and Public Safety entities
Consumer Two Way Radio including FRS (Family Radio Service), GMRS (General Mobile Radio Service) and Citizens band ("CB") radios
The Amateur Radio Service (Ham radio)
Consumer and professional Marine VHF radios
Cellular telephones and pagers: provide connectivity for portable and mobile applications, both personal and business.
Global Positioning System (GPS): allows drivers of cars and trucks, captains of boats and ships, and pilots of aircraft to ascertain their location anywhere on earth.
Cordless computer peripherals: the cordless mouse is a common example; keyboards and printers can also be linked to a computer via wireless.
Cordless telephone sets: these are limited-range devices, not to be confused with cell phones.
Satellite television: allows viewers in almost any location to select from hundreds of channels.
Wireless gaming: new gaming consoles allow players to interact and play in the same game regardless of whether they are playing on different consoles. Players can chat, send text messages as well as record sound and send it to their friends. Controllers also use wireless technology. They do not have any cords but they can send the information from what is being pressed on the controller to the main console which then processes this information and makes it happen in the game. All of these steps are completed in milliseconds.
Wireless networking (i.e. the various types of unlicensed 2.4 GHz WiFi devices) is used to meet many needs. Perhaps the most common use is to connect laptop users who travel from location to location. Another common use is for mobile networks that connect via satellite. A wireless transmission method is a logical choice to network a LAN segment that must frequently change locations. The following situations justify the use of wireless technology:
To span a distance beyond the capabilities of typical cabling,
To avoid obstacles such as physical structures, EMI, or RFI,
To provide a backup communications link in case of normal network failure,
To link portable or temporary workstations,
To overcome situations where normal cabling is difficult or financially impractical, or
To remotely connect mobile users or networks.
Wireless communication can be via:
radio frequency communication,
microwave communication, for example long-range line-of-sight via highly directional antennas, or short-range communication, or
infrared (IR) short-range communication, for example from remote controls or via Infrared Data Association (IrDA).
Applications may involve point-to-point communication, point-to-multipoint communication, broadcasting, cellular networks and other wireless networks.
The term "wireless" should not be confused with the term "cordless", which is generally used to refer to powered electrical or electronic devices that are able to operate from a portable power source (e.g. a battery pack) without any cable or cord to limit the mobility of the cordless device through a connection to the mains power supply. Some cordless devices, such as cordless telephones, are also wireless in the sense that information is transferred from the cordless telephone to the telephone's base unit via some type of wireless communications link. This has caused some disparity in the usage of the term "cordless", for example in Digital Enhanced Cordless Telecommunications.
Professional LMR (Land Mobile Radio) and SMR (Specialized Mobile Radio) typically used by business, industrial and Public Safety entities
Consumer Two Way Radio including FRS (Family Radio Service), GMRS (General Mobile Radio Service) and Citizens band ("CB") radios
The Amateur Radio Service (Ham radio)
Consumer and professional Marine VHF radios
Cellular telephones and pagers: provide connectivity for portable and mobile applications, both personal and business.
Global Positioning System (GPS): allows drivers of cars and trucks, captains of boats and ships, and pilots of aircraft to ascertain their location anywhere on earth.
Cordless computer peripherals: the cordless mouse is a common example; keyboards and printers can also be linked to a computer via wireless.
Cordless telephone sets: these are limited-range devices, not to be confused with cell phones.
Satellite television: allows viewers in almost any location to select from hundreds of channels.
Wireless gaming: new gaming consoles allow players to interact and play in the same game regardless of whether they are playing on different consoles. Players can chat, send text messages as well as record sound and send it to their friends. Controllers also use wireless technology. They do not have any cords but they can send the information from what is being pressed on the controller to the main console which then processes this information and makes it happen in the game. All of these steps are completed in milliseconds.
Wireless networking (i.e. the various types of unlicensed 2.4 GHz WiFi devices) is used to meet many needs. Perhaps the most common use is to connect laptop users who travel from location to location. Another common use is for mobile networks that connect via satellite. A wireless transmission method is a logical choice to network a LAN segment that must frequently change locations. The following situations justify the use of wireless technology:
To span a distance beyond the capabilities of typical cabling,
To avoid obstacles such as physical structures, EMI, or RFI,
To provide a backup communications link in case of normal network failure,
To link portable or temporary workstations,
To overcome situations where normal cabling is difficult or financially impractical, or
To remotely connect mobile users or networks.
Wireless communication can be via:
radio frequency communication,
microwave communication, for example long-range line-of-sight via highly directional antennas, or short-range communication, or
infrared (IR) short-range communication, for example from remote controls or via Infrared Data Association (IrDA).
Applications may involve point-to-point communication, point-to-multipoint communication, broadcasting, cellular networks and other wireless networks.
The term "wireless" should not be confused with the term "cordless", which is generally used to refer to powered electrical or electronic devices that are able to operate from a portable power source (e.g. a battery pack) without any cable or cord to limit the mobility of the cordless device through a connection to the mains power supply. Some cordless devices, such as cordless telephones, are also wireless in the sense that information is transferred from the cordless telephone to the telephone's base unit via some type of wireless communications link. This has caused some disparity in the usage of the term "cordless", for example in Digital Enhanced Cordless Telecommunications.
refrence:http://en.wikipedia.org/




